Der Vorteil eines solchen Hybriden liegt zunächst darin, daß er wesentlich
stabiler und gedämpfter fliegt als ein Gyro, zudem ist er "nach oben hin"
schneller als der reine Gyro und "nach unten hin" langsamer als das reine
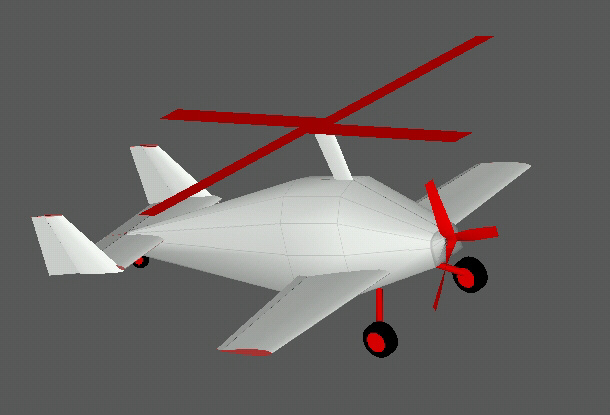
Flugzeug. Das abgebildete Fliegerechen hebt mit 475 kg und 100 PS nach 10 m
Rollstrecke ab, fliegt eine Vmax von 220 km/h und hat eine Vmin von 45 km/h.
Eine Reise von ca. 180 km/h ist bei voller Zuladung mit nur 65 PS gesetzter
Motorleistung möglich. Ein reiner Gyro bräuchte das Doppelte - und mehr noch an
Sprit.Gyro-Rotoren behalten übrigens ihre Drehzahl nicht wie oft behauptet dadurch
bei, daß sie von unten angeströmt werden (sie drehen sich auch bei Anströmung
von oben und erzeugen dann je nach Profil mehr oder weniger viel Abtrieb, falls
sie nicht vorher wegen zu geringer Fliehkraftkomponente brechen). Gyro-Rotoren
sind vielmehr in der Drehzahl unmittelbar davon abhängig, wieviel Last sie
unter welchem Anströmwinkel bei wieviel g tragen. Die Folge:
Bei einem Hybridflugzeug dieser Art nimmt die Last für den Rotor im Quadrat der
Fluggeschwindigkeit ab, weil der Flügel zunehmend die Last trägt. Der Rotor
wird also langsamer, womit auch sein Widerstand sinkt, denn dieser nimmt im
Kubik zur Drehzahl ab/zu. Wird das Hybridflugzeug dagegen langsamer, nimmt der
Auftrieb der Flügel im Quadrat der Geschwindigkeit ab und die Last für den
Rotor entsprechend zu. Der Rotor dreht dann schneller und erzeugt deutlichen
Zusatzauftrieb für einen Langsamflug oder eine langsame Landung.Interessant ist bei einem solchen Hybriden, daß man ein Flugzeug mit
unsymmetrischer Auftriebsverteilung benötigt, abgestimmt auf den Rotor, der
immer noch mitsteuert, also nicht etwa fix ist. X-plane kann ab Version 8.6
einen Gyro-Rotor inklusive des wichtigen Flapping-Effekts, Steuerung, Nachlauf,
resultierendem Konus etc. erstmals simulieren, also kann man sich jetzt den
Vorteilen eines Hybriden, eines Gyrowing, erstmals über eine Simulation nähern.
Auch über die Probleme, die plötzliche Boen und "wilde" Piloten verursachen
könnten. Last but not least:
In den USA gibt es ein System namens Cartercopter in der Erprobung, das
ähnlich, aber weit komplexer aufgebaut ist. Hier noch zwei Videos zu meinem
Gyrowing:
Das erste zeigt den Gyrowing bei 10 kn Gegenwind, Rotor ist eingekuppelt, bei
Erreichen der vorgesehenen Drahzahl werden Motor und Rotor getrennt und die
Bremsen gelöst. Das Flugzeug beschleunig selbständig und hands off und hebt ab,
keine Steuerhilfe oder Autopilot oder künstlich erhöhte Trägheit. Wenn man
weiß, wie schwer sich Gyros in x-plane meist starten und wie kritisch sich auch
Taildragger benehmen, erscheint einem das gezeigte Verhalten meines Gyrowings
als ideal. Das zweite Video zeigt den gleichen Start von Hand gesteuert,
Knüppel ganz hinten. Mehr später...
New ideas: An interesting project is the hybrid of wing-and-rotor-
aircraft. Wing and rotor have the same span, 5,5 m. The rotor drag
decreases in a cube law to rpm and lift of the wings increase squared
with the speed, so there will be a region of speed, which gives the most
effective gyrowing. The little x-plane hybrid, which can be simulated
with x-plane 8.60 the first time, flies well, much better than any other
gyrosim I tested. But heavy gust, thermals and a wild pilot might be a
problem - still, but not forever I guess. Interesting to simulate and much more simple than "Cartercopter".
The first video shows a hands off take-off in a 10 kn headwind, just by
inactivating the prerotator clutch and the wheelbrakes at max. rpm. No
autopilot, no stability augmentation or own radii of gyration. The plane
does it all by itself. Try that with a usual gyro or taildragger. The
second video shows the same craft with stick full back and steered by
hand in take off. More to come...